|
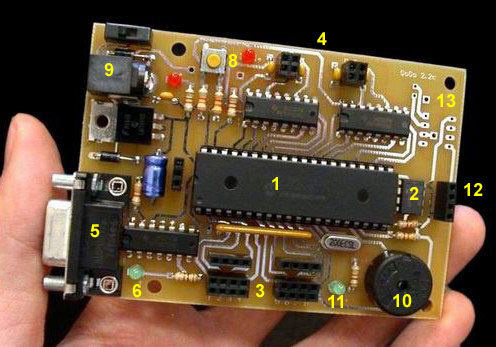
GoGo board 2.2d
[See Change Log
- Sep 17, 2003]
[Click to enlarge]
The GoGo board allows your computer to interact with
sensors (touch, light, sound, etc) and actuators (motors, lights,
relays). It can also execute stored procedures allowing it to function
independently from a computer (see
tethered vs autonomous mode for more info). If you know the
LEGO Mindstorms or the
Cricket (also
here), then you know
what the GoGo board can do.
The board is low-cost and designed specifically to be
built by non-experts. We hope to provide an alternative means for people
(especially students and hobbyist with limited resources) to gain better
access to computational design tools. See our
publications
for more information.
Building a GoGo board
The following diagram illustrates the
basic steps of board construction
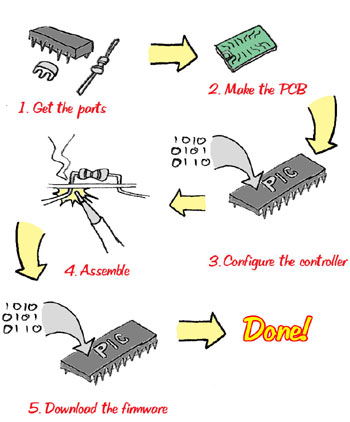
[Click here for more information]
Specifications & features:
- 20 MHz PIC 16F877 microcontroller.
- 32K bytes EEPROM. 26K of which are available for data logging.
- Eight sensor inputs (10 bits resolution).
- Four output ports. Polarity is programmable. Output power 1A max.
- Connection to a computer via the serial port.
- A serial activity LED.
- In addition to the tethered mode (GoGo 1.x), it now can store
procedures and run autonomously (using Cricket Logo).
- A button to start/stop stored procedures and a run status LED.
- Power source: AC adapter (9-15V) or 4xAA batteries.
- A Beeper
- One user programmable LED
- I2C bus. Can be used to connect to expansion modules.
- Real-time Clock option
- Large PCB pads for easy soldering.
- Upgradeable firmware (via the serial port.)
|
|