|
GoGo
board library for Microworlds Logo
Multi-threaded version 1.0
Command Reference
by Arnan (Roger) Sipitakiat
arnans@media.mit.edu
Please visit
http://learning.media.mit.edu/projects/gogo for the latest version of
this document.
[ I - Sensor Commands |
II - Output (Motor) Commands ]
I - Sensor Commands
sensor1
sensor2
sensor3
sensor4
sensor5
sensor6
sensor7
sensor8
|
Read the sensor value. Value ranges between 0-1023.
- 1023 is returned when there's no sensor
attached to the port (highest resistance).
- 0 is returned when the sensor is short
circuited (no resistance).
|
switch1
switch2
switch3
switch4
switch5
switch6
switch7
switch8
|
Returns the ON/OFF status of the sensor. This
command is simply a macro that returns
- ON (1) if the sensor value is less than 512
- OFF (0) if the value is more than or equal to
512.
|
|
Examples |
show sensor1
will show sensor1's value
if switch1 [ fd 100]
will move the current turtle 100 steps if switch1
is ON.
waituntil [not switch3]
will pause the program until switch3 is OFF. |
|
|
|
|
sensorMax1
sensorMax2
sensorMax3
sensorMax4
sensorMax5
sensorMax6
sensorMax7
sensorMax8 |
Returns the maximum sensor reading the board has
detected since the last sensorMax operation.
The GoGo board automatically stores the highest
sensor value it detects on each sensor port. It will send and reset this
value of sensor port N
every time a sensorMaxN
command is used, where N ranges between 1 to 8.
This function is very useful especially when the
sensor is activated for a very short time (such as a push button used in
a game). In this case, detecting the change by polling the sensor from
Microworlds is often not quick enough. This is where sensorMax
becomes very handy. |
|
sensorMin1
sensorMin2
sensorMin3
sensorMin4
sensorMin5
sensorMin6
sensorMin7
sensorMin8 |
Same idea as sensorMax but returns the
minimum sensor value the board has detected since the previous
sensorMin operation. |
|
|
|
|
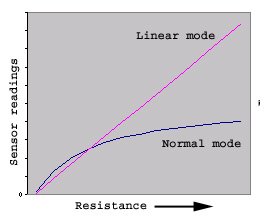
doLinear |
Switches the sensor readings to "linear mode."
In linear mode, sensor readings will be re-mapped
to make it increase/decrease at a constant rate according to the sensor
resistance. The mapped value can grow beyond the 1023 limit of the
normal mode.
- 0 is still 0
- 1024 is mapped to 523776.
A useful example of this mode is when you use a
potentiometer (variable resister) to measure an angle (say .. you are
making a steering wheel and you attach the potentiometer on its axel).
In the normal mode, the sensor readings would change at an increasing or
decreasing rate, making it hard to use. In the linear mode, the sensor
readings would change at a constant rate.
Note: Sensor ports with no sensor attached would
return 523,776 instead of 1024. |
|
doNormal |
Switches the sensor readings to "normal mode."
(Default)
In normal mode. Sensor readings will always stay in
the 0-1023 range. |
|
Examples |
show sensor1
251
show senosr2
806
doLinear
show sensor1
166
show sensor2
1892
This example shows how sensor readings are mapped
differently when switched to the linear mode.
|
II - Output (motor) Commands
|
|
Talk to an
output port. This command will set the corresponding port at the active
port. It will be the port effected by the action commands below. |
| |
|
TalkToPort [Port-list]
|
Talk to
multiple output ports. Use this command when you want to control
multiple devices simultaneously.
Port-list consists of a list of port names ranging from 'a'
to 'f' |
|
Examples |
TalkToPort [a b c]
will set port a, b, and c as the active ports.
TalkToPort [a f c b]
will set port a, b, c, and f as the active ports
(notice that port order has no effect) |
| |
|
On
|
Turns on
the power of the active port(s). |
Off
|
Turns off
the power of the active port(s).
Note: Off is actually a macro
that calls Break (see below) and wait for a short time then calls Coast.
It does this to save battery power. |
Coast
|
Turns off
the power of the active port(s). When attached to motors, no breaking is
applied. Thus, the motor will gradually slow down before stopping
completely. |
Break
|
When used
with motors, Break will immediately stop the motors (see Coast).
Note: the break command draw a lot
more energy from the battery than Coast and Break. It continues to
consume power even though the motors have stopped. Thus, use it with
care. |
OnFor Duration
|
Turns on
the active port for a Duration of time.
Duration is in tenth of a second. |
|
Examples |
tta
on
wait 10
off
will turn on port A for 1 second. This is the
equivalent of:
tta
onfor 10
|
| |
|
Thisway
Thatway
|
When used
with motors, these two commands controls the direction in which the
motor turns.
Thisway and Tahtway could mean clockwise or
counter-colckwise depending on how the motors are plugged into the port. |
Rd
|
Rd
reverses the direction of the motor. |
|
|
SetPower Power
|
Sets the
power level of the active port.
Power ranges
between 0-7. The default power level is 7 (full power). |
|
Examples |
TalkToMotor [a b c d e f]
setpower 4
will lower the power of all output ports by half
of the full power. |
Back to Top
|
